
|
Design of hyperspectral sensors and camera systems |
Many different techniques have been developed to enable spectral imaging. Typically a scanning-based solution is used, where at each point in time a subset of the spectral cube is sensed, requiring scanning over the remaining dimensions to fully acquire the cube. This is a major distinction compared to snapshot spectral cameras where the entire cube is acquired at one distinct point in time. |
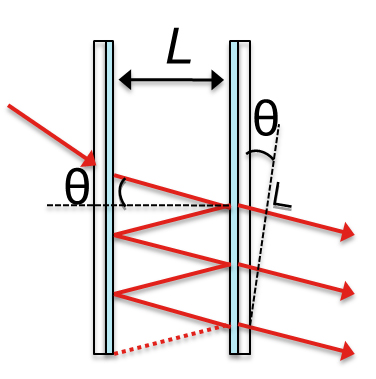 |
The Fabry-Pérot filter concept
|
|
One linescan sensor (600-1000nm) and two different mosaic sensors (4x4 470-730nm; 5x5 600-1000nm) were developed for the design of the cameras. The linescan filter layout has a wedge design: the filters in the linescan layout are organized in small bands of a fixed height over the full width of the active area. Typically the width of the active area equals the width of the sensor. Because of the organization of the filters, in bands over the whole width of the sensor, this layout is best suited for linescan applications. |
 |
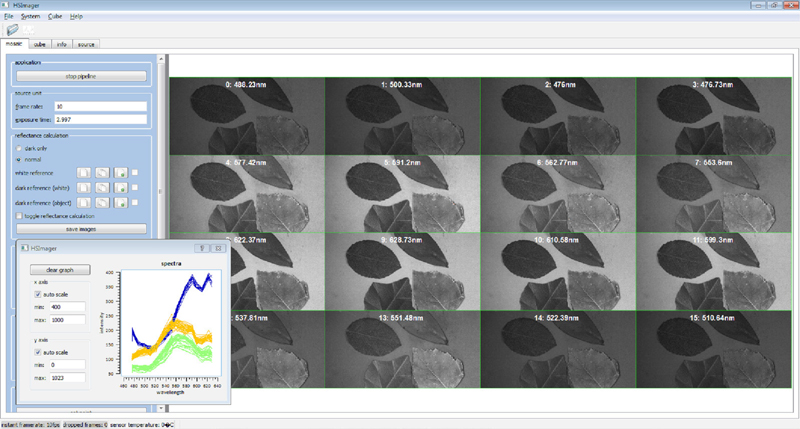
The sensors were calibrated to generate accurate spectral/spatial information for each of the spectral bands, and were later on integrated into cameras. Fully operational prototype systems were then developed based on these cameras, including an illumination setup, optical components for cameras and also software for hyperspectral data acquisition. These 3 different systems were made available to the partners, to perform various experiments during the remainder of the project. A training session was organized to demonstrate the usage of the camera systems and to provide essential user training. |
  |
Publications:
|
Achievements